Singh offers big-picture frameworks for thinking about assured autonomy
August 17, 2021 | Amy French
Dr. Sanjiv Singh drew on a multifaceted career in autonomy to offer several high-level frameworks for thinking about what it will take to realize the potential in unmanned aerial systems safely.
Singh, a consulting professor at the Robotics Institute at Carnegie Mellon University , began his career in 1985 working on the first autonomous ground vehicles to operate outdoors. Among other accomplishments, he led a team in 2010 that demonstrated the first full-scale autonomous helicopter capable of take-off, landing zone evaluation and safe descent.
He is also CEO of Near Earth Autonomy, a startup that develops autonomy for next-generation aircraft that will inspect infrastructure, deliver cargo, and transport passengers.
Central to all of Singh’s assertions was understanding that the path to assured autonomy must be paved with trust.
“We’ve got a large number of stakeholders,” he said, naming users, operators, investors, regulators, insurers, and developers. “They’re all looking for some version of trust before they put their money, they put their kid, or they put themselves or their cargo in one of these vehicles of the future.”
Expanding on the idea of stakeholder perspectives, Singh started with an overview of three perspectives on autonomy.
The first was that of the roboticist, which focuses on the need for an autonomous vehicle to maintain a continual cycle of “Sense / Plan / Act / Interact functions. The second was that of an aerospace engineer, which focuses on stability control. And the third was that of the regulator, which necessarily focuses on “off-nominal” variables – or anything that might go wrong.
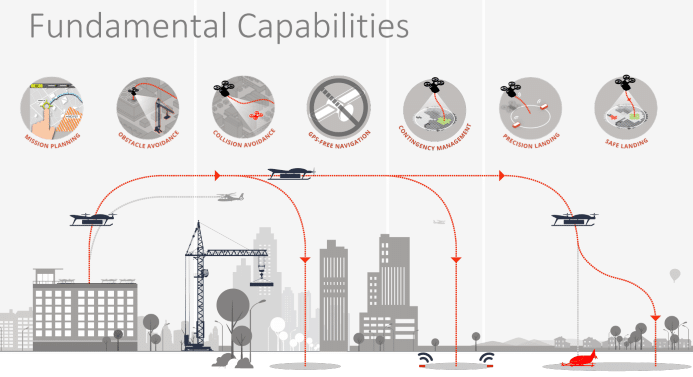
Next, Singh outlined seven capabilities that Near Earth has identified as essential “for a vehicle to fly safely and efficiently, from before the vehicle takes off to the time it lands.”
-
Mission planning – uses all available information to find a path toward an objective
-
Obstacle avoidance
-
Collision avoidance
-
Flying without GPS / GPS-denied navigation
-
Contingency management
-
Precision landing – landing in a specific placeSafe landing – landing without causing harm

He honed in on the challenge of GPS-denied navigation, saying, “Flying without GPS is a very big deal because if GPS is either jammed or degraded, we know all kinds of problems will occur. In fact, a lot of aircraft flying today would come down very rapidly if somehow or another, the GPS were degraded or completely went away even for a short period of time.”
Solutions can come in different configurations, but to be trustworthy, any technology must have four characteristics, Singh said.
-
It must be capable.
-
It must be robust.
-
It must fail safely.
-
It must improve continuously.
- Industry News